| 傾僪儗僗 |
丂價僢僩暆丂 |
丂俼乛倂丂 |
丂婡擻丂 |
| 侽倶俥俥俥侽侽侽俆俠 |
丂俁俀乮侾儘儞僌儚乕僪乯丂 |
丂俼俷丂 |
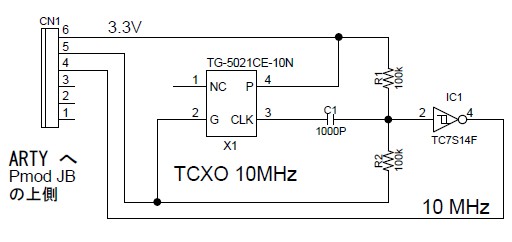
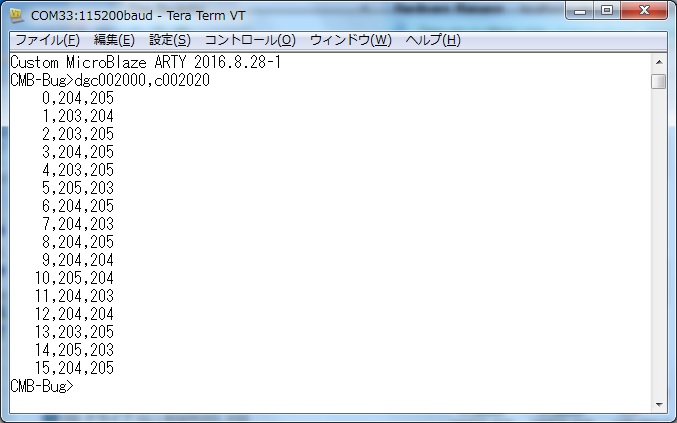
丂俠俹倀偺侾侽侽俵俫倸偱侾戜栚偺侾俹俹俽偺僀儞僞乕僶儖傪僇僂儞僩偟偨抣丂 |
| 侽倶俥俥俥侽侽侽俇侽 |
丂俁俀乮侾儘儞僌儚乕僪乯丂 |
丂俼俷丂 |
丂俠俹倀偺侾侽侽俵俫倸偱俀戜栚偺侾俹俹俽偺僀儞僞乕僶儖傪僇僂儞僩偟偨抣丂 |
| 侽倶俥俥俥侽侽侽俇係 |
丂俁俀乮侾儘儞僌儚乕僪乯丂 |
丂俼俷丂 |
丂忋婰俀屄偺抣偺嵎丂 |
| 侽倶俥俥俥侽侽侽俇俉 |
丂俁俀乮侾儘儞僌儚乕僪乯丂 |
丂俼俷丂 |
丂俿俠倃俷偺侾侽侽俵俫倸偱侾戜栚偺侾俹俹俽偺僀儞僞乕僶儖傪僇僂儞僩偟偨抣丂 |
| 侽倶俥俥俥侽侽侽俇俠 |
丂俁俀乮侾儘儞僌儚乕僪乯丂 |
丂俼俷丂 |
丂俿俠倃俷偺侾侽侽俵俫倸偱俀戜栚偺侾俹俹俽偺僀儞僞乕僶儖傪僇僂儞僩偟偨抣丂 |
| 侽倶俥俥俥侽侽侽俈侽 |
丂俁俀乮侾儘儞僌儚乕僪乯丂 |
丂俼俷丂 |
丂忋婰俀屄偺抣偺嵎丂 |
| 侽倶俥俥俥侽侽侽俈係 |
丂侾俇價僢僩偺撪丄俴俽俛侾俀價僢僩丂 |
丂俼俷丂 |
丂侾戜栚偺婰榐梡俼俙俵偺尰嵼偺抣丂 |
| 侽倶俥俥俥侽侽侽俈係 |
丂侾俇價僢僩偺撪丄俢侾俀偺埵抲丂 |
丂俼俷丂 |
丂侾戜栚偺婰榐梡俼俙俵傾僪儗僗偑忋尷偵払偟偨偲偒侾丂 |
| 侽倶俥俥俥侽侽侽俈俇 |
丂侾俇價僢僩偺撪丄俴俽俛侾俀價僢僩丂 |
丂俼俷丂 |
丂俀戜栚偺婰榐梡俼俙俵偺尰嵼偺抣丂 |
| 侽倶俥俥俥侽侽侽俈俇 |
丂侾俇價僢僩偺撪丄俢侾俀偺埵抲丂 |
丂俼俷丂 |
丂俀戜栚偺婰榐梡俼俙俵傾僪儗僗偑忋尷偵払偟偨偲偒侾丂 |